 新浪微博
新浪微博 騰訊微博
騰訊微博械")
械")
北重試驗(yàn)臺(tái)鐵地板廠家介紹:三軸數(shù)控滑臺(tái)技術(shù)概述
北重試驗(yàn)臺(tái)鐵地板廠家介紹:三軸數(shù)控滑臺(tái)技術(shù)概述
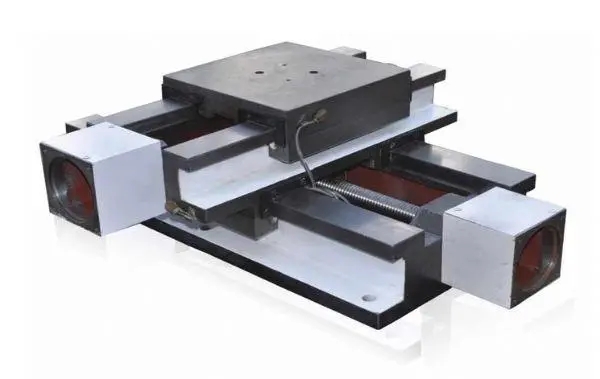
三軸數(shù)控滑臺(tái)是一種集成機(jī)械結(jié)構(gòu)、驅(qū)動(dòng)系統(tǒng)、控制系統(tǒng)和檢測(cè)反饋裝置的自動(dòng)化運(yùn)動(dòng)平臺(tái),能夠?qū)崿F(xiàn)X、Y、Z三個(gè)正交方向的精密定位與運(yùn)動(dòng)控制。作為自動(dòng)化裝備的核心功能部件,廣泛應(yīng)用于精密加工、電子制造、生物醫(yī)療、科研實(shí)驗(yàn)等領(lǐng)域,是實(shí)現(xiàn)自動(dòng)化生產(chǎn)和精密操作的關(guān)鍵基礎(chǔ)設(shè)備。
機(jī)械系統(tǒng)是三軸數(shù)控滑臺(tái)的基礎(chǔ)框架,主要由導(dǎo)軌、滑塊、滾珠絲杠、工作臺(tái)面和基座組成:
· 導(dǎo)軌組件:采用高精度線性導(dǎo)軌(如滾珠導(dǎo)軌、滾柱導(dǎo)軌),提供運(yùn)動(dòng)導(dǎo)向并承受負(fù)載,決定系統(tǒng)的直線度、平行度等幾何精度。導(dǎo)軌的材料通常選用高硬度合金鋼(如SUJ2),經(jīng)淬火磨削加工,表面粗糙度可達(dá)Ra0.4μm以下。
· 傳動(dòng)機(jī)構(gòu):主流采用滾珠絲杠副傳動(dòng),由絲杠、螺母和滾珠組成,將電機(jī)的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為直線運(yùn)動(dòng)。絲杠導(dǎo)程精度等級(jí)通常達(dá)到C3-C5級(jí)(ISO標(biāo)準(zhǔn)),反向間隙通過預(yù)緊機(jī)構(gòu)可控制在0.01mm以內(nèi)。
· 結(jié)構(gòu)框架:采用鋁型材(如6061-T6)或鑄鐵(如HT300)制作基座和工作臺(tái),通過有限元分析優(yōu)化結(jié)構(gòu)設(shè)計(jì),確保高剛性和低振動(dòng)特性,減少運(yùn)動(dòng)過程中的變形誤差。
驅(qū)動(dòng)系統(tǒng)為滑臺(tái)提供動(dòng)力輸出,主要由伺服電機(jī)和減速裝置組成:
· 伺服電機(jī):常用交流伺服電機(jī)(如松下A6系列、臺(tái)達(dá)ASDA-B3系列)或步進(jìn)電機(jī)(用于低成本場(chǎng)合),配備高精度編碼器(17位-23位絕對(duì)值編碼器),實(shí)現(xiàn)位置和速度的精確控制。伺服電機(jī)的額定轉(zhuǎn)速一般為3000rpm,輸出扭矩范圍0.1N·m-10N·m。
· 驅(qū)動(dòng)控制:每個(gè)軸配置獨(dú)立的伺服驅(qū)動(dòng)器,接收控制系統(tǒng)的脈沖指令(脈沖+方向信號(hào))或總線信號(hào),實(shí)現(xiàn)電流環(huán)、速度環(huán)、位置環(huán)的三環(huán)閉環(huán)控制。
· 控制系統(tǒng)是滑臺(tái)的"大腦",負(fù)責(zé)運(yùn)動(dòng)規(guī)劃和軌跡控制:
· 控制器:采用專用運(yùn)動(dòng)控制器(如固高GTS系列、雷賽DMC系列)或PLC+運(yùn)動(dòng)控制模塊,支持G代碼、PLCopen運(yùn)動(dòng)控制標(biāo)準(zhǔn),可實(shí)現(xiàn)多軸插補(bǔ)(直線插補(bǔ)、圓弧插補(bǔ))、點(diǎn)位運(yùn)動(dòng)、連續(xù)軌跡運(yùn)動(dòng)等控制模式。
· 編程接口:提供數(shù)控系統(tǒng)操作面板、上位機(jī)軟件(如Mach3、UG CAM)或API開發(fā)接口(C++/Python SDK),支持手動(dòng)示教和自動(dòng)程序運(yùn)行兩種工作模式。
檢測(cè)反饋系統(tǒng)實(shí)現(xiàn)位置和速度的實(shí)時(shí)監(jiān)測(cè),構(gòu)成閉環(huán)控制:
· 位置檢測(cè):高精度場(chǎng)合采用光柵尺(如海德漢LS系列)作為直接測(cè)量元件,分辨率可達(dá)0.1μm-1μm,測(cè)量長(zhǎng)度覆蓋滑臺(tái)行程范圍;普通精度場(chǎng)合采用電機(jī)編碼器的間接測(cè)量方式。
· 信號(hào)處理:反饋信號(hào)經(jīng)細(xì)分電路處理后傳輸至控制器,采樣頻率通常達(dá)到1MHz以上,確保運(yùn)動(dòng)過程中的動(dòng)態(tài)響應(yīng)精度。
三軸數(shù)控滑臺(tái)的性能指標(biāo)主要包括精度參數(shù)、動(dòng)態(tài)參數(shù)和負(fù)載參數(shù)三大類,典型參數(shù)范圍如下表所示:
|
參數(shù)類別 |
具體指標(biāo) |
典型數(shù)值范圍 |
單位 |
|
定位精度 |
單軸重復(fù)定位精度 |
±0.001-±0.01 |
mm |
|
單軸定位精度 |
±0.005-±0.02 |
mm |
|
|
三軸空間定位精度 |
±0.01-±0.05 |
mm |
|
|
動(dòng)態(tài)性能 |
最大運(yùn)行速度 |
50-1000 |
mm/s |
|
最大加速度 |
0.5-5 |
m/s² |
|
|
負(fù)載能力 |
額定負(fù)載(垂直軸) |
5-500 |
N |
|
最大傾覆力矩 |
5-500 |
N·m |
三軸數(shù)控滑臺(tái)通過"指令-驅(qū)動(dòng)-執(zhí)行-反饋"的閉環(huán)控制流程實(shí)現(xiàn)精密運(yùn)動(dòng)控制:
1. 指令輸入:操作人員通過數(shù)控程序(G代碼)或上位機(jī)發(fā)送運(yùn)動(dòng)指令,指定目標(biāo)位置(如X=100.5mm, Y=50.3mm, Z=15.2mm)、運(yùn)動(dòng)速度(如F=300mm/min)和運(yùn)動(dòng)模式(如直線插補(bǔ)G01)。
2. 軌跡規(guī)劃:控制器根據(jù)輸入指令進(jìn)行運(yùn)動(dòng)學(xué)計(jì)算,將三維空間軌跡分解為各軸的位移分量,生成平滑的速度曲線(如S型加減速),避免運(yùn)動(dòng)沖擊。
3. 驅(qū)動(dòng)執(zhí)行:控制器向各軸伺服驅(qū)動(dòng)器發(fā)送脈沖信號(hào)(脈沖當(dāng)量通常為0.001mm/pulse),驅(qū)動(dòng)器控制伺服電機(jī)旋轉(zhuǎn),通過滾珠絲杠帶動(dòng)工作臺(tái)移動(dòng)。
4. 反饋調(diào)節(jié):光柵尺或編碼器實(shí)時(shí)檢測(cè)工作臺(tái)實(shí)際位置,并將信號(hào)反饋至控制器,控制器對(duì)比指令位置與實(shí)際位置,通過PID算法調(diào)整輸出信號(hào),消除位置偏差,實(shí)現(xiàn)精確控制。
通過運(yùn)動(dòng)控制器的插補(bǔ)算法實(shí)現(xiàn)三軸聯(lián)動(dòng),確保空間復(fù)雜軌跡的精確執(zhí)行。例如在曲面加工中,通過XYZ三軸的實(shí)時(shí)速度協(xié)調(diào),使刀具中心始終保持預(yù)定軌跡,輪廓誤差可控制在0.01mm以內(nèi)。常見的插補(bǔ)方式包括:
· 直線插補(bǔ)(G01):實(shí)現(xiàn)空間任意兩點(diǎn)間的直線運(yùn)動(dòng)
· 圓弧插補(bǔ)(G02/G03):實(shí)現(xiàn)平面圓弧運(yùn)動(dòng)
· 螺旋線插補(bǔ):實(shí)現(xiàn)空間螺旋軌跡運(yùn)動(dòng)
為提高系統(tǒng)精度,采用多種誤差補(bǔ)償方法:
· 幾何誤差補(bǔ)償:通過激光干涉儀測(cè)量21項(xiàng)幾何誤差(如定位誤差、直線度誤差、垂直度誤差),建立誤差模型,在控制器中實(shí)時(shí)補(bǔ)償。
· 溫度誤差補(bǔ)償:采用溫度傳感器監(jiān)測(cè)環(huán)境溫度和絲杠溫度,根據(jù)材料熱膨脹系數(shù)(如鋼的α=11.5×10??/℃)計(jì)算熱變形量并進(jìn)行補(bǔ)償。
· 反向間隙補(bǔ)償:通過參數(shù)設(shè)置補(bǔ)償絲杠螺母副的反向死區(qū),提高換向運(yùn)動(dòng)的定位精度。
采用先進(jìn)控制算法(如自適應(yīng)PID、前饋控制、摩擦補(bǔ)償)優(yōu)化系統(tǒng)動(dòng)態(tài)性能:
· 通過加速度前饋控制減少跟蹤誤差,使系統(tǒng)在高速運(yùn)動(dòng)時(shí)仍保持高精度(如300mm/s速度下跟蹤誤差<0.01mm)。
· 采用庫侖摩擦+粘性摩擦模型補(bǔ)償?shù)退龠\(yùn)動(dòng)時(shí)的"爬行"現(xiàn)象,提高低速平穩(wěn)性(最低穩(wěn)定速度可達(dá)0.1mm/s)。
三軸數(shù)控滑臺(tái)作為自動(dòng)化裝備的"關(guān)節(jié)",其技術(shù)水平直接影響整個(gè)設(shè)備的性能。未來通過機(jī)械設(shè)計(jì)優(yōu)化、控制算法創(chuàng)新和新材料應(yīng)用,將向更高精度、更快速度、更智能的方向發(fā)展,為精密制造和智能裝備提供更強(qiáng)大的技術(shù)支撐。
相關(guān)資訊
- 直線滑臺(tái)的伺服驅(qū)動(dòng)技術(shù):實(shí)現(xiàn)高精度…
- 告別定位偏差:十字滑臺(tái)為自動(dòng)化加工…
- 北重機(jī)械解析:工業(yè)生產(chǎn)中無處不在的"…
- 自動(dòng)化設(shè)備的"精準(zhǔn)手腳":三軸滑臺(tái)
- 伺服驅(qū)動(dòng)+滾珠絲桿:數(shù)控立柱滑臺(tái)的高…
- 數(shù)控立柱滑臺(tái)在龍門加工中心中的應(yīng)用…
- 為什么選河北北重的數(shù)控三軸滑臺(tái)?精…
- 焊接機(jī)器人數(shù)控十字滑臺(tái):抗干擾強(qiáng),…


同類文章排行
- 告別定位偏差:十字滑臺(tái)為自動(dòng)化加工…
- 自動(dòng)化設(shè)備的"精準(zhǔn)手腳":三軸滑臺(tái)
- 數(shù)控立柱滑臺(tái)在龍門加工中心中的應(yīng)用…
- 焊接機(jī)器人數(shù)控十字滑臺(tái):抗干擾強(qiáng),…
- 數(shù)控十字硬軌滑臺(tái):重載工況下的高精…
- 直線數(shù)控滑臺(tái)的精度之謎:絲桿傳動(dòng)…
- 十字滑臺(tái)入門科普:定義、分類與核心…
- 負(fù)載、行程、速度全達(dá)標(biāo)!這款十字…
- 一字滑臺(tái):工業(yè)制造領(lǐng)域精度的"隱形脊…
- 一字滑臺(tái)的奧秘:精密機(jī)械的隱形基石
